Leg Construction
In this section we will cover the construction of the legs for your Mech.
There are many leg configurations you can use, but we have settled on a standard configuration, that most of RTEAM uses (so the control code can easily be ported from Mech to Mech). For the build of '99, we will use this standard configuration (and by configuration I mean the orientation of the AX-12A's and the leg parts).
There are also many materials you can use to construct your Mech's legs. We've used Dyanmixel frames, 3D printed parts, laser cut acetal (Delron) parts, and even aluminum material for leg construction. In this tutorial, we'll stick with the simplest method, Dynamixel frames (though at a later time I will post the 3D printed legs that are used in '99.)
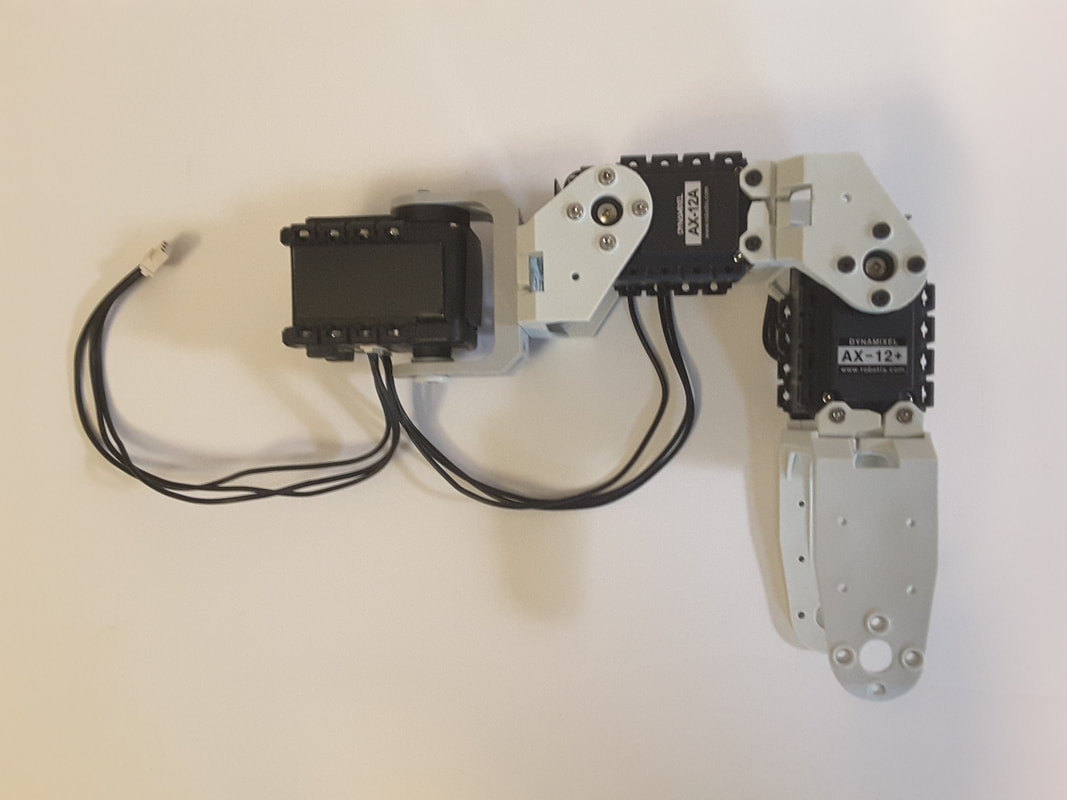
The basic leg construction is as in the following figure.
There are many leg configurations you can use, but we have settled on a standard configuration, that most of RTEAM uses (so the control code can easily be ported from Mech to Mech). For the build of '99, we will use this standard configuration (and by configuration I mean the orientation of the AX-12A's and the leg parts).
There are also many materials you can use to construct your Mech's legs. We've used Dyanmixel frames, 3D printed parts, laser cut acetal (Delron) parts, and even aluminum material for leg construction. In this tutorial, we'll stick with the simplest method, Dynamixel frames (though at a later time I will post the 3D printed legs that are used in '99.)
The basic leg construction is as in the following figure.
|
What you will need per leg are:
|
Basic assembly of the Dynamixel Frames to AX-12A's
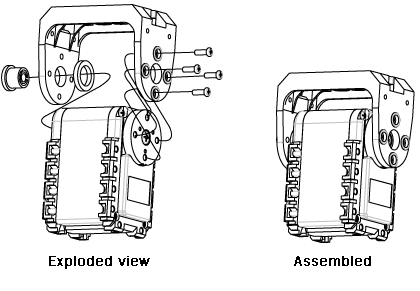
|
